Jiafeng Xu
Publications
Projects
Blog Posts
Jiafeng Xu
Researcher
Follow
Beijing, China
Seed, ByteDance
Email
Google Scholar
ORCID
GitHub
LinkedIn
Selected Projects
GR-RL: Going Dexterous and Precise for Long-Horizon Robotic Manipulation
Manipulation as in Simulation: Enabling Accurate Geometry Perception in Robots
ByteDance Seed GR-3 Technical Report
GR-2: A Generative Video-Language-Action Model with Web-Scale Knowledge for Robot Manipulation
WMP: World Model-based Perception for Visual Legged Locomotion
GR-1: Unleashing Large-Scale Video Generative Pre-training for Visual Robot Manipulation
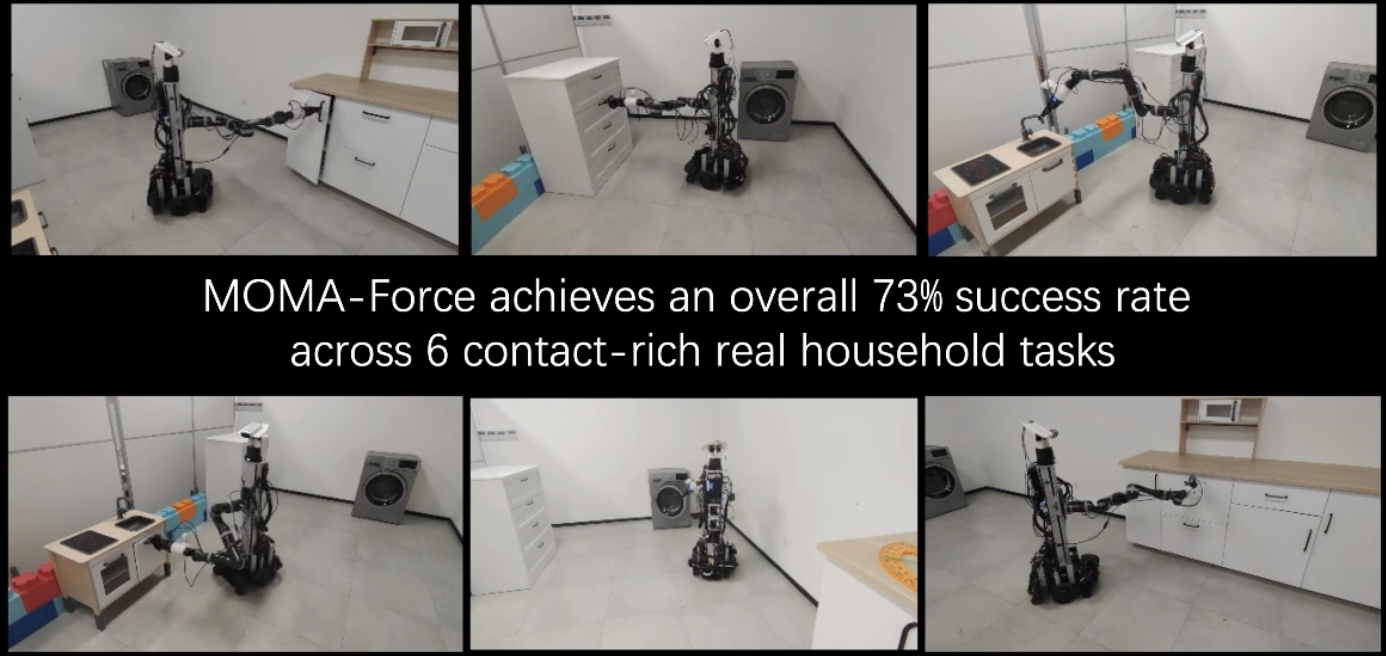
MOMA-Force: Visual-Force Imitation for Real-World Mobile Manipulation
Max: High dynamic quadruped robot
Ollie: Whole-body motion control of wheel-legged robot